|
|
|
infrared rangefinding not so good for fuel measurement
Friday, December 28 2012
Gretchen had somewhere she needed to be so I went out to driveway to shovel away the snow. Unfortunately, I'd waited a bit long. In the past 24 hours the snow had been blown around into drifts and then a brief warm period had come and the snow had been rained on. Now conditions had returned to frigid and the snow had solidified into a tough material that was hard enough to break up in places where it hadn't been stepped or driven upon and impossible to break up in the places where it had. Expending an enormous amount of energy (and drenching my Forever Lazy union suit in sweat), I just barely got the driveway to the point where Gretchen could back out of it in the Honda Civic Hybrid. And then I had to abandon that union suit, which I'd been wearing since Christmas morning. It had begun to stink.
I installed the infrared-rangefinder-based fuel gauge on top of the oil tank today and started looking at the data. I knew from experience that the digitized values from the rangefinder range from about 700 (for objects close to the sensor) to zero (for objects more than about five feet from the sensor). The problem with this setup was that the tank wasn't even half empty but my readings were already down to about 70. Considering that the relationship of fuel level to rangefinder readings is not linear, this wouldn't have been a deal breaker. But the readings weren't consistent (and I'm not the only one with this problem). They varied from 75 to 65, and they were sure to vary even more as the fuel level receded away beneath the sensor. This lack of consistency is something I'd feared but had had no easy way to test outside the tank; measuring fuel is different enough from measuring the distance to a wall that it's impossible to know what will happen until you actually build the device. It's possible, for example, that the inconsistencies had something to do with the optical transparency of fuel oil, which is different from the optical transparency of something I might test with (such as water), especially in the near-infrared part of the spectrum. I tried compensating for the inconsistencies of the readings by taking lots of them and then taking the average, but even the averages proved inconsistent, suggesting that the variation in the readings is more fractal than gaussian.
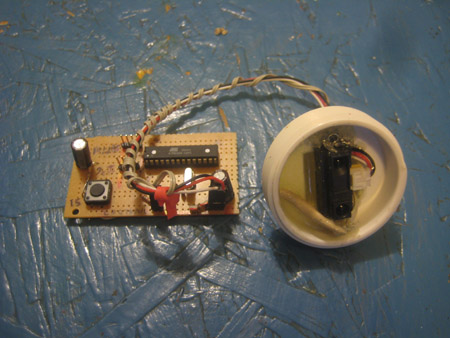
The IR fuel gauge, with an Atmega-based controller board (running an Arduino-developed firmware and communicating with the solar controller 12 feet away over an I2C bus). You can see the IR transmitter and receiver LEDs inside the PVC cap, which screws into the top of the fuel oil tank.
For linking purposes this article's URL is:
http://asecular.com/blog.php?121228 feedback
previous | next |